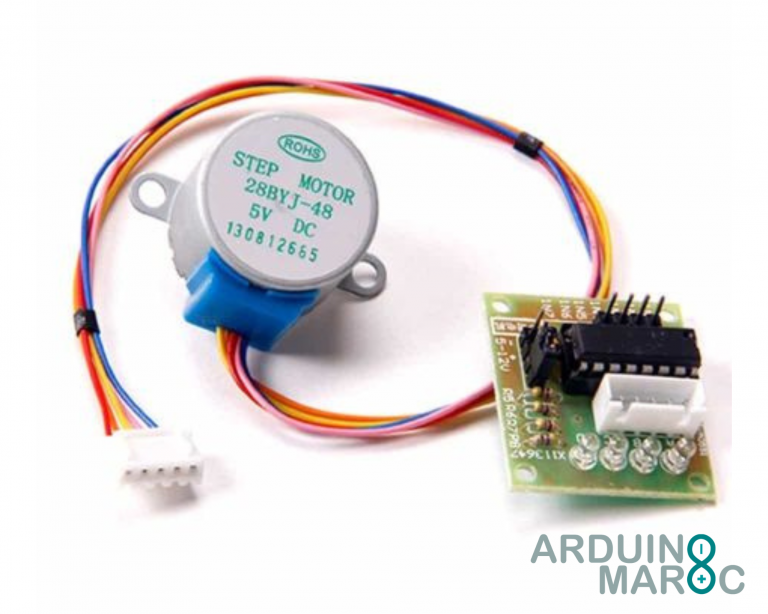
Moteur pas-à-pas avec driver ULN2003 est un système de contrôle de moteur électrique qui utilise un moteur pas-à-pas 28BYJ-48 et un driver ULN2003 pour contrôler le mouvement précis du moteur.
Le driver ULN2003 amplifie les signaux de commande envoyés et les envoie aux enroulements de fils du moteur pas-à-pas 28BYJ-48 pour faire tourner le moteur dans des directions spécifiques.
Ce système est couramment utilisé dans les applications nécessitant un positionnement précis, comme les imprimantes 3D, les robots et les caméras de sécurité.
Promotion Arduino
Dépêchez-vous et obtenez des réductions sur tous les produits Arduino jusqu'à 20 %
Sale_coupon_15
60.00د.م.Le prix initial était : 60.00د.م..45.00د.م.Le prix actuel est : 45.00د.م..
Mode de paiement : A la livraison, Chèque, Virement
Description
Moteur pas-à-pas avec Driver ULN2003
Moteur pas-à-pas 28BYJ-48 est un type de moteur électrique couramment utilisé pour les applications nécessitant un positionnement précis, comme les imprimantes 3D, les robots et les caméras de sécurité.
Driver ULN2003 est un circuit intégré souvent utilisé pour contrôler les moteurs pas-à-pas, y compris le moteur 28BYJ-48.
Caractéristiques techniques du Moteur pas-à-pas avec Driver ULN2003
Video descriptif du Moteur pas-à-pas avec Driver ULN2003
Utilisation du moteur pas-à-pas avec Driver ULN2003 :
Pour utiliser le moteur pas-à-pas 28BYJ-48 avec le driver ULN2003, il faut d’abord connecter les fils du moteur aux sorties du driver ULN2003. Les cinq fils du moteur sont généralement de couleur rouge, jaune, bleu, rose et orange.
Les sorties du driver ULN2003 sont numérotées de un à sept et chaque sortie correspond à un enroulement de fils du moteur pas-à-pas 28BYJ-48.
Le schéma de connexion est le suivant :
Fils rouge du moteur -> sortie 1 du driver ULN2003
Fils jaune du moteur-> sortie 2 du ULN2003
Fils bleu du moteur -> sortie 3 du driver
Fils orange du moteur -> non connecté
Fils rose du moteur -> sortie 4 du driver ULN2003
Une fois que les fils du moteur sont connectés aux sorties du driver ULN2003, l’Arduino (Uno, Mega, Nano,…) peut être utilisé pour contrôler le moteur pas-à-pas 28BYJ-48.
Pour ce faire, il faut envoyer des signaux de commande au driver ULN2003.
Pour faire tourner le moteur pas-à-pas 28BYJ-48 dans le sens des aiguilles d’une montre, l’Arduino doit envoyer les signaux de commande suivants : 1, 2, 3, 4, 1, 2, 3, 4, etc.
Pour faire tourner le moteur pas-à-pas 28BYJ-48 dans le sens inverse des aiguilles d’une montre l’Arduino doit envoyer les signaux de commande suivants : 4, 3, 2, 1, 4, 3, 2, 1, etc.
Fonctionnement du moteur pas-à-pas avec Driver ULN2003:
Fonctionnement du moteur pas-à-pas 28BYJ-48 :
Moteur pas-à-pas 28BYJ-48 est un moteur à quatre phases avec cinq fils, qui se déplace par incréments discrets grâce à la manière dont le champ magnétique est créé par le stator.
Les enroulements de fils du stator sont alimentés en séquence, créant ainsi un champ magnétique qui attire le rotor dans une direction spécifique.
Lorsque le champ magnétique est inversé, le rotor est repoussé dans une autre direction. En alternant la séquence d’alimentation des enroulements de fils, le moteur pas-à-pas 28BYJ-48 peut être déplacé dans des directions spécifiques.
Le 28BYJ-48 a un angle de pas de 5.625 degrés, ce qui signifie qu’il doit effectuer 64 pas pour faire une rotation complète de 360 degrés. Cela permet un contrôle précis de la position du moteur.
Fonctionnement du driver ULN2003 :
Le driver ULN2003 est un circuit intégré utilisé pour contrôler les moteurs pas-à-pas, y compris le moteur 28BYJ-48. Le circuit est composé de sept transistors Darlington, qui sont capables de gérer des courants élevés.
Les transistors Darlington sont utilisés pour amplifier le signal envoyé par le microcontrôleur au moteur pas-à-pas.
Le driver ULN2003 est alimenté par une source d’alimentation externe de 5 à 12 volts. Le microcontrôleur envoie des signaux de commande au driver, qui amplifie ces signaux et les envoie aux enroulements de fils du moteur pas-à-pas 28BYJ-48.



 Aperçu
Aperçu
 Alimentation
Alimentation
 Connectivité
Connectivité
 Puce
Puce

Avis
Effacer tous les filtresIl n’y a pas encore d’avis.